|
PREGLED EKSPERIMENTALNIH SISTEMA I LABORATORIJSKIH MODELA |
|
| |
|
| Redni broj |
Naziv |
Slika/Ilustracija |
Kratak
opis / prezentacija lab. modela |
| 1 |
Automatizacija
amfiteatra MFKa (250 mesta) |
 |
Projekat: TR18020 Upravlja
se radom trokrakih ventila, mere se spoljne i unutrašnje
temperature, relativna vlažnost, potrošnja energije,
protoci u cevovodu. Moguce korišcenje rezultata merenja
i saradnja u smislu testiranja strategija upravljanja. |
| 2 |
Eksperimentalni sistem
sa RC kolom. |
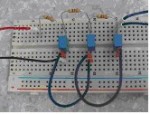 |
Objekat upravljanja je elektricno kolo koje se sastoji
iz redno vezanih RC kola, pri cemu se razmatraju 2 slucaja
1) RC kola su odvojena operacionim pojacavacima, 2) RC
kola nisu odvojena operacionim pojacavacima.
|
| 3 |
Laboratorijski
sistem PT400 |
 |
Laboratorijski model temperaturnog
procesa sa kašnjenjem PT400, MF Kragujevac 2008. |
| 4 |
Laboratorijski sistem
UPF22 |
 |
Laboratorijski model procesa
akumulacije vode u rezervoaru sa cistim transportnim kašnjenjem
UPF22, MF Kragujevac 2009. Upravlja se pumpom i ventilom
radi regulacije nivoa vode u rezervoaru. Nivo se može
meriti kapacitivnim senzorom i senzorom pritiska koji se
nezavisno moraju i baždariti.
|
| 5 |
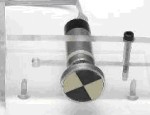
Laboratorijski model
sa DC motorom u ulozi izvršnog organa |
 |
|
| 6 |
Laboratorijski
model helikoptera
|
 |
|
| 7 |
Laboratorijski model
spregnutih rezervoara - 3Tank sistema |
 |
|
| 8 |
Laboratorijski model(i)
vazdušnog lifta |
 |
|
| 9 |
Laboratorijski model
pokretanja koracnog motora |
 |
|
| 10 |
Laboratorijski model
simulatora sporih procesa |
 |
|
| 11 |
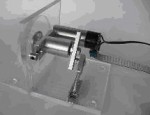
Laboratorijski model
upravljanja ugla ploce u tunelu struje vazduha |
 |
|
| 12 |
Laboratorijski model
upravljanja ugla ploce sa ventilatorom promenljivog rastojanja
i broja obrtaja |
 |
|
| 13 |
DC motor sa enkoderom |
 |
|
| 14 |
DC motor sa enkoderom
i nelinearnim opterecenjem |
 |
|
| 15 |
Laboratorijski model
spregnutih rezervoara – 4 Tank sistem |
 |
|
| 16 |
Laboratorijski model
krana / inverznog klatna |
 |
|
| 17 |
Digitalno upravljani
analogni racunar |
 |
|
| 18 |
ASURO mobilni robot(i) |
 |
Mali mobilni roboti, mikroproce-sorski upravljani, opremljeni
senzo-rima koji omogucavaju pracenje crne crte i kretanje
po lavirintu.

|
| 19 |
LEGO mobilni robot(i)
|
 |
|
| 20 |
SCARA robotski model
|
 |
|
| 21 |
Laboratorijski model
upravljanja raskrsnice (sistem semafora) |
 |
|
| 22 |
Upravljenje semaforom
pomocu FPGA (Field Programmable Gate Array) |
 |
|
| 23 |
Laboratorijski model
spregnutih elektromotornih pogona |
 |
|
| 24 |
Laboratorijski model
modularnog servosistema |
 |
|
| 25 |
PLC sistem(i) A1/A4
za obuku |
 |
|
| 26 |
ELVIS NI II |
 |
|
| 27 |
Pozicioniranje kamere
dvoosnim mehanizmom sa dva DC motora sa inkrementalnim enkoderom |
 |
|
|
| |
|
|
